Foundation dynamic analysis¶
Python code:
# -*- coding: utf-8 -*-
import matplotlib.pyplot as plt
import numpy as np
import strupy.units as u
from unum.units import um
u.um = um
import math
#! ### Fundament blokowy po wentylator
show = True #<<< (zobacz podstawy teoretyczne)
if show:
#%img action_foundation_fig_1.png
None
#! ---
#! ### Dane wejściowe
#! Geometria fundamentu
a_f = 3.8 * u.m #<< - szerokość fundamentu
b_f = 5.20* u.m #<< - dlugość fundamentu
h_f = 1.4 * u.m #<< - wysokość fundamentu
m_f = a_f * b_f * h_f * 2100 * u.kg / u.m3 #! - masa fundamentu betonowego
#! Dane urzadzenia
m_u = 4640.0 * u.kg #<< - masa urzadzenia
n_m = 991.0 #<< - predkość obrotowa [rpm]
n_m / 60.0 #%requ - częstość w [Hz]
omega_m = n_m / (60.0 * u.s) * 2 * math.pi #! - predkość obrotowa [rad/s]
h_u = 3.2 * u.m #<< - wysokość srodka cęźkośći maszyny wzgl. spodu fund
P_d = 1.57 * u.kN #<< - siła dynamiczna
h_s = 3.2 * u.m #<< - wysokość przyłozenia siły wzgl. spodu fundamentu
#! Podloże gruntowe
C_o = 18.0 * u.MPa / u.m #<< - dynamiczny wsp. podloża (wg. tab.1 PN)
#! ---
#! ### Obliczenia
M_c = m_u + m_f #! - masa calkowita
F = a_f * b_f #! - powierzchnia podstawy fundamentu
p = M_c / F * 10.0 * u.N / u.kg
p = p.asUnit(u.kPa) #! - nacisk statyczny na grunt
#! Współczynniki sztywności podłoża
C_z = C_o * (1 + 2*(a_f + b_f) / (u.m**-1 * F)) * (p/(20*u.kPa))**0.5 #! - dynamiczny współczynnik podłoza
C_x = 0.7 * C_z #! - ddynamiczny współczynnik podłoza
C_fi = C_o * (1 + 2*(a_f + 3 * b_f) / (u.m**-1 * F)) * (p/(20*u.kPa))**0.5 #! - dynamiczny współczynnik podłoża
#! Sztywność podłoża
K_z = C_z * F
K_z = K_z.asUnit(u.kN / u.m) #! - sztywność kier. z
K_x = C_x * F
K_x = K_x.asUnit(u.kN / u.m) #! - sztywność kier. x
I_y = a_f**3 * b_f / 12 #! - moment bezwladności podstawy
K_fi = I_y * C_fi
K_fi = K_fi.asUnit(u.kNm) #! - sztywność na obrót
z_k = (m_f * h_f/2 + m_u * h_u) / M_c #! - wysokość środka cięźkośći układu
#! Połozenie punktu kontroli drgań
zp = 3.2 * u.m #<< wysokość od podstawy fundamentu
xp = 0.0 * u.m #<< odleglość w poziomie od osi fundamentu
delta = 0.1 #<< - błąd szacowania czestotliwości degań własnych
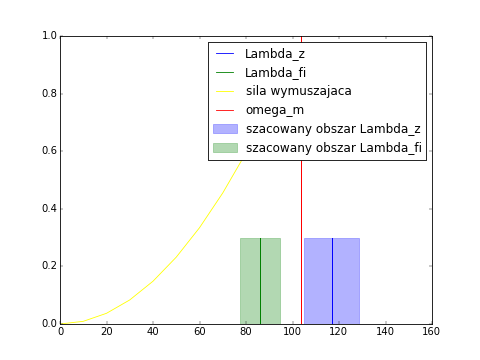
#! ### Kątowa częstość drgań pionowych
Lambda_z = (K_z / M_c)**0.5 #%requ - w [rad/s] (czestość maszyny var_omega_m)
Lambda_zmin = Lambda_z * (1 - delta) #%requ - dolna granica szacowanej czestotliwości
Lambda_zmax = Lambda_z * (1 + delta) #%requ - górna granica szacowanej czestotliwości
#! Szacowana czestość rezonansowa w przedziale val_Lambda_zmin - val_Lambda_zmax
A_oz = P_d / K_z
A_oz =A_oz.asUnit(u.um)#! - przemieszczenie pionowe pod dzialaniem statycznym sily Pd
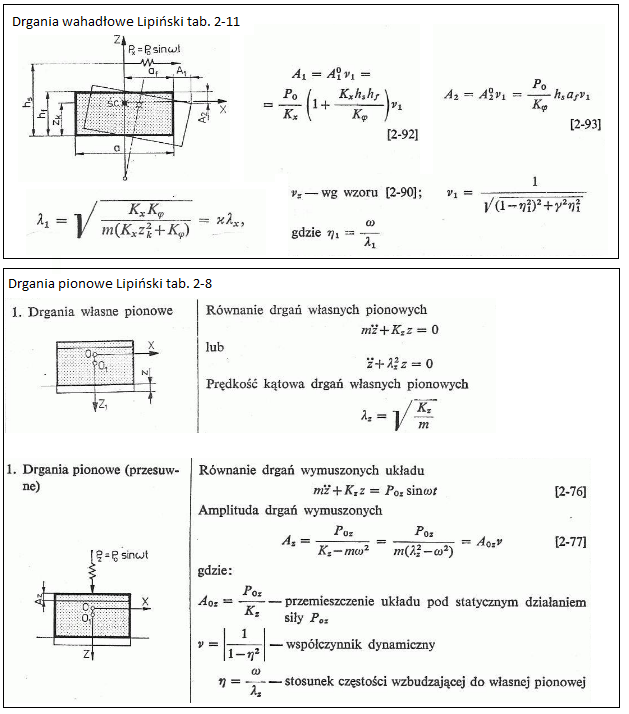
#! ### Katowa czestość drgan wahadlowych
Lambda_fi = (K_x * K_fi /( M_c * (K_x * z_k**2 + K_fi)) )**0.5 #! - w [rad/s] (czestość maszyny var_omega_m)
Lambda_fimin = Lambda_fi * (1 - delta) #%requ - dolna granica szacowanej czestotliwości
Lambda_fimax = Lambda_fi * (1 + delta) #%requ - górna granica szacowanej czestotliwości
#! Szacowana czestość rezonansowa w przedziale val_Lambda_fimin - val_Lambda_fimax
A_o1 = P_d / K_x * (1 + K_x * h_s * zp / K_fi)
A_o1 = A_o1.asUnit(u.um)#! - przemieszczenie poziome pod dzialaniem statycznym sily Pd
A_o2 = P_d / K_fi * h_s * xp
A_o2 = A_o2.asUnit(u.um)#! - przemieszczenie pionowe pod dzialaniem statycznym sily Pd
#! ### Rodzaj strojenia
#! Ze wzgledu na czestotliwość var_Lambda_z
if Lambda_zmin < omega_m < Lambda_zmax:
#! ####!!!Praca w strefie rezonansu var_Lambda_zmin < var_omega_m < var_Lambda_zmax !!!
None
if omega_m < Lambda_zmin:
None
#! OK - Strojenie wysokie var_omega_m < var_Lambda_zmin
if Lambda_zmax < omega_m:
None
#! OK - Strojenie niskie var_Lambda_zmax < var_omega_m
#! Ze wzgledu na czestotliwość var_Lambda_fi
if Lambda_fimin < omega_m < Lambda_fimax:
#! ####!!!Praca w strefie rezonansu var_Lambda_fimin < var_omega_m < var_Lambda_fimax !!!
None
if omega_m < Lambda_fimin:
None
#! OK - Strojenie wysokie var_omega_m < var_Lambda_fimin
if Lambda_fimax < omega_m:
None
#! OK - Strojenie niskie var_Lambda_fimax < var_omega_m
show = True #<<< (zobacz wykres strojenia)
if show:
x_max = 1.2*max(omega_m, Lambda_zmax, Lambda_fimax).asNumber()
y1 = np.array([0, 0, 0.3, 0.3, 0, 0])
x1 = np.array([0, Lambda_zmin.asNumber(), Lambda_zmin.asNumber(), Lambda_zmax.asNumber(), Lambda_zmax.asNumber(), x_max])
x1a = np.array([0, Lambda_z.asNumber(), Lambda_z.asNumber(), Lambda_z.asNumber(), Lambda_z.asNumber(), x_max])
y2 = y1
x2 = np.array([0, Lambda_fimin.asNumber(), Lambda_fimin.asNumber(), Lambda_fimax.asNumber(), Lambda_fimax.asNumber(), x_max])
x2a = np.array([0, Lambda_fi.asNumber(), Lambda_fi.asNumber(), Lambda_fi.asNumber(), Lambda_fi.asNumber(), x_max])
xm1 = np.arange(0.0, omega_m.asNumber(), 10.0)
ym1 = 1.0 * (xm1 / omega_m.asNumber())**2
ym2 = np.array([0, 0, 1.0, 0, 0])
xm2 = np.array([0, omega_m.asNumber(), omega_m.asNumber(), omega_m.asNumber(), x_max])
plt.figure(1)
plt.fill(x1, y1, alpha=0.3, label='szacowany obszar Lambda_z', color='blue')
plt.plot(x1a, y1, label='Lambda_z', color='blue')
plt.fill(x2, y2, alpha=0.3, label='szacowany obszar Lambda_fi', color='green')
plt.plot(x2a, y2, label='Lambda_fi', color='green')
plt.plot(xm1, ym1, label='sila wymuszajaca', color='yellow')
plt.plot(xm2, ym2, label='omega_m', color='red')
plt.legend()
plt #%plt
#plt.show()
plt.clf()
#! ### Naprezenia pod fundamentem
p #! - nacisk statyczny na grunt od fundamentu i maszyny
sigma_pov = P_d / F
sigma_pov = sigma_pov.asUnit(u.kPa)#! - statyczny nacisk od sily wymuszajacej pionowo
sigma_poh = (P_d * h_s)/(a_f**2 * b_f / 6)
sigma_poh = sigma_poh.asUnit(u.kPa)#! - statyczny nacisk od sily wymuszajacej poziomo
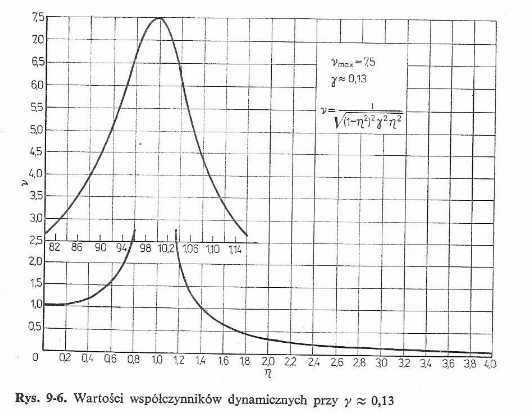
#! ### Amplitudy drgań
gamma = 0.13 #! - tłumienie gruntu
#!--------------------------------------------------------------------------------
#! ###Praca na pełnych obrotach val_omega_m
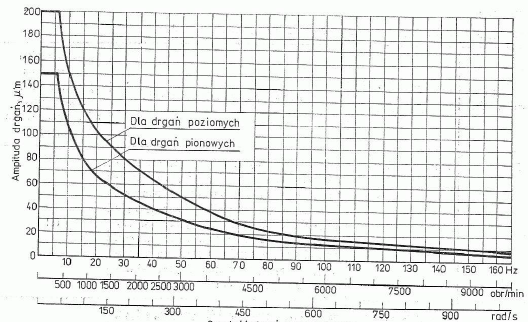
#! Dopuśćzalne amplitudy drgań dla val_omega_m
omega_m / (2*math.pi) * 60.0 #%requ x [obr]
show = True #<<< (zobacz wykres PN)
if show:
#%img action_foundation_fig_3.png
None
A_xdop = 110.0 * u.um #<< - poziomych
A_zdop = 70.0 * u.um #<< - pionowych
#! #### Drgania pionowe
if omega_m < Lambda_zmin:
Lambda_zmod = Lambda_zmin #%requ strojenie wysokie
if omega_m > Lambda_zmax:
Lambda_zmod = Lambda_zmax #%requ strojenie niskie
if Lambda_zmin <= omega_m <= Lambda_zmax:
Lambda_zmod = omega_m #%requ praca w strefie rezonansu!!!
Lambda_zmod = Lambda_zmod * 0.999
eta_z = omega_m / Lambda_zmod #%requ
tlumienie = False
if 0.75<eta_z<1.25:
#! fundament pracuje w strefie rezonanasu
tlumienie = True #<<< - dodatkwowo uzglednic tłumienie var_gamma (nie zalecane)
if tlumienie:
ni = 1 / ((1 - eta_z**2)**2 + gamma**2)**0.5 #%requ - wzmocnienie
else:
ni = 1 / ((1 - eta_z**2)**2)**0.5 #%requ - wzmocnienie
A_dz = ni * A_oz #%requ - Amplituda drgań pionowych
#! #### Drgania wahadłowe
if omega_m < Lambda_fimin:
Lambda_fimod = Lambda_fimin #%requ strojenie wysokie
if omega_m > Lambda_fimax:
Lambda_fimod = Lambda_fimax #%requ strojenie niskie
if Lambda_fimin <= omega_m <= Lambda_fimax:
Lambda_fimod = omega_m #%requ praca w strefie rezonansu!!!
Lambda_fimod = Lambda_fimod * 0.999
eta_fi = omega_m / Lambda_fimod #%requ
tlumienie = False
if 0.75<eta_fi<1.25:
#! fundament pracuje w strefie rezonanasu
tlumienie = False #<<< - dodatkwowo uzglednic tłumienie var_gamma (nie zalecane)
if tlumienie:
ni = 1 / ((1 - eta_fi**2)**2 + gamma**2)**0.5 #%requ - wzmocnienie
else:
ni = 1 / ((1 - eta_fi**2)**2)**0.5 #%requ - wzmocnienie
A_do1 = ni * A_o1 #%requ - amplituda drgań poziomych
A_do2 = ni * A_o2 #%requ - amplituda drgań pionowych
#! #### Drgania całkowite
A_x = A_do1 #%requ - całkowita amplituda drgań poziomych var_A_xdop
A_z = A_dz + A_do2 #%requ - całkowita amplituda drgań pionowych var_A_zdop
if (A_x > A_xdop) or (A_z > A_zdop):
None
#! ### !! Przekroczone amplitudy drgań !!
if Lambda_zmax < omega_m:
#!--------------------------------------------------------------------------------
#! ### Rezonans przejśćiowy dla var_Lambda_zmax (drgania pionowe)
omega_r = Lambda_zmax #!
omega_r / (2*math.pi) * 60.0 #%requ x [obr]
#! Dopuśćzalne amplitudy drgań dla val_omega_r
show = True #<<< (zobacz wykres PN)
if show:
#%img action_foundation_fig_3.png
None
A_xdop = 120.0 * u.um #<< - poziomych
A_zdop = 80.0 * u.um #<< - pionowych
P_dred = P_d * (omega_r / omega_m)**2 #%requ -siła dynamiczna dla obrotów val_omega_r
#! Drgania pionowe
eta_z = omega_r / (Lambda_z) #%requ
ni = 1 / ((1 - eta_z**2)**2 + gamma**2)**0.5 #%requ - wzmocnienie
A_dz = P_dred / P_d * ni * A_oz #%requ - Amplituda drgań pionowych
#! Drgania wahadłowe
eta_fi = omega_r / (1.25* Lambda_fi) #%requ
ni = 1 / ((1 - eta_fi**2)**2 + gamma**2)**0.5 #%requ - wzmocnienie
A_do1 = P_dred / P_d * ni * A_o1 #%requ - amplituda drgań poziomych
A_do2 = P_dred / P_d * ni * A_o2 #%requ - amplituda drgań pionowych
#! Drgania całkowite
A_x = A_do1 #%requ - całkowita amplituda drgań poziomych var_A_xdop
A_z = A_dz + A_do2 #%requ - całkowita amplituda drgań pionowych var_A_zdop
if (A_x > A_xdop) or (A_z > A_zdop):
None
#! ### !! Przekroczone amplitudy drgań !!
if Lambda_fimax < omega_m:
#!--------------------------------------------------------------------------------
#! ### Rezonans przejśćiowy dla Lambda_fimax (drgania wahadłowe)
omega_r = Lambda_fi #!
omega_r / (2*math.pi) * 60.0 #%requ x [obr]
#! Dopuśćzalne amplitudy drgań dla val_omega_r
show = True #<<< (zobacz wykres PN)
if show:
#%img action_foundation_fig_3.png
None
A_xdop = 140.0 * u.um #<< - poziomych
A_zdop = 100.0 * u.um #<< - pionowych
P_dred = P_d * (omega_r / omega_m)**2 #%requ -siła dynamiczna dla obrotów val_omega_r
#! Drgania pionowe
eta_z = omega_r / (0.75 * Lambda_z) #%requ
ni = 1 / ((1 - eta_z**2)**2 + gamma**2)**0.5 #%requ - wzmocnienie
A_dz = P_dred / P_d * ni * A_oz #%requ - Amplituda drgań pionowych
#! Drgania wahadłowe
eta_fi = omega_r / (Lambda_fi) #%requ
ni = 1 / ((1 - eta_fi**2)**2 + gamma**2)**0.5 #%requ - wzmocnienie
A_do1 = P_dred / P_d * ni * A_o1 #%requ - amplituda drgań poziomych
A_do2 = P_dred / P_d * ni * A_o2 #%requ - amplituda drgań pionowych
#! Drgania całkowite
A_x = A_do1 #%requ - całkowita amplituda drgań poziomych var_A_xdop
A_z = A_dz + A_do2 #%requ - całkowita amplituda drgań pionowych var_A_zdop
if (A_x > A_xdop) or (A_z > A_zdop):
None
#! ### !! Przekroczone amplitudy drgań !!
#! ---
show = True #<<< (pomocnicze - zobacz wykres wsp. dynamicznego)
if show:
#%img action_foundation_fig_2.png
None
Loge output report:
 Alt text
Alt textDane wejściowe¶
Geometria fundamentu
a_f = 3.80 [m] - szerokość fundamentu
b_f = 5.20 [m] - dlugość fundamentu
h_f = 1.40 [m] - wysokość fundamentu
m_f = 58094.40 [kg] - masa fundamentu betonowego
Dane urzadzenia
m_u = 4640.00 [kg] - masa urzadzenia
n_m = 991.0 - predkość obrotowa [rpm]
n_m / 60.0 = 16.5167 - częstość w [Hz]
omega_m = 103.78 [1/s] - predkość obrotowa [rad/s]
h_u = 3.20 [m] - wysokość srodka cęźkośći maszyny wzgl. spodu fund
P_d = 1.57 [kN] - siła dynamiczna
h_s = 3.20 [m] - wysokość przyłozenia siły wzgl. spodu fundamentu
Podloże gruntowe
C_o = 18.00 [MPa/m] - dynamiczny wsp. podloża (wg. tab.1 PN)
Obliczenia¶
M_c = 62734.40 [kg] - masa calkowita
F = 19.76 [m2] - powierzchnia podstawy fundamentu
p = 31.75 [kPa] - nacisk statyczny na grunt
Współczynniki sztywności podłoża
C_z = 43.34 [MPa/m] - dynamiczny współczynnik podłoza
C_x = 30.34 [MPa/m] - ddynamiczny współczynnik podłoza
C_fi = 67.21 [MPa/m] - dynamiczny współczynnik podłoża
Sztywność podłoża
K_z = 856345.26 [kN/m] - sztywność kier. z
K_x = 599441.68 [kN/m] - sztywność kier. x
I_y = 23.78 [m4] - moment bezwladności podstawy
K_fi = 1598099.91 [kNm] - sztywność na obrót
z_k = 0.88 [m] - wysokość środka cięźkośći układu
Połozenie punktu kontroli drgań
zp = 3.20 [m] wysokość od podstawy fundamentu
xp = 0.00 [m] odleglość w poziomie od osi fundamentu
delta = 0.1 - błąd szacowania czestotliwości degań własnych
Kątowa częstość drgań pionowych¶
Lambda_z = (K_z / M_c)^0.5 = 116.83 [1/s] - w [rad/s] (czestość maszyny omega_m = 103.78 [1/s] )
Lambda_zmin = Lambda_z * (1 - delta) = 105.15 [1/s] - dolna granica szacowanej czestotliwości
Lambda_zmax = Lambda_z * (1 + delta) = 128.52 [1/s] - górna granica szacowanej czestotliwości
Szacowana czestość rezonansowa w przedziale 105.15 [1/s] - 128.52 [1/s]
A_oz = 1.83 [um] - przemieszczenie pionowe pod dzialaniem statycznym sily Pd
Kątowa czestość drgan wahadlowych¶
Lambda_fi = 85.94 [1/s] - w [rad/s] (czestość maszyny omega_m = 103.78 [1/s] )
Lambda_fimin = Lambda_fi * (1 - delta) = 77.35 [1/s] - dolna granica szacowanej czestotliwości
Lambda_fimax = Lambda_fi * (1 + delta) = 94.54 [1/s] - górna granica szacowanej czestotliwości
Szacowana czestość rezonansowa w przedziale 77.35 [1/s] - 94.54 [1/s]
A_o1 = 12.68 [um] - przemieszczenie poziome pod dzialaniem statycznym sily Pd
A_o2 = 0.00 [um] - przemieszczenie pionowe pod dzialaniem statycznym sily Pd
Rodzaj strojenia¶
Ze wzgledu na czestotliwość Lambda_z = 116.83 [1/s]
OK - Strojenie wysokie omega_m = 103.78 [1/s] < Lambda_zmin = 105.15 [1/s]
Ze wzgledu na czestotliwość Lambda_fi = 85.94 [1/s]
OK - Strojenie niskie Lambda_fimax = 94.54 [1/s] < omega_m = 103.78 [1/s]
☑ (zobacz wykres strojenia)
 Alt text
Alt text
Naprezenia pod fundamentem¶
p = 31.75 [kPa] - nacisk statyczny na grunt od fundamentu i maszyny
sigma_pov = 0.08 [kPa] - statyczny nacisk od sily wymuszajacej pionowo
sigma_poh = 0.40 [kPa] - statyczny nacisk od sily wymuszajacej poziomo
Amplitudy drgań¶
gamma = 0.13 - tłumienie gruntu
Praca na pełnych obrotach 103.78 [1/s]¶
Dopuśćzalne amplitudy drgań dla 103.78 [1/s]
omega_m / (2*pi) * 60.0 = 991.00 [1/s] x [obr]
☑ (zobacz wykres PN)
 Alt text
Alt text
A_xdop = 110.00 [um] - poziomych
A_zdop = 70.00 [um] - pionowych
Drgania pionowe¶
Lambda_zmod = Lambda_zmin = 105.15 [1/s] strojenie wysokie
eta_z = omega_m / Lambda_zmod = 0.99 []
fundament pracuje w strefie rezonanasu
☑ - dodatkwowo uzglednic tłumienie gamma = 0.13 (nie zalecane)
ni = 1 / ((1 - eta_z^2)^2 + gamma^2)^0.5 = 7.54 [] - wzmocnienie
A_dz = ni * A_oz = 13.83 [um] - Amplituda drgań pionowych
Drgania wahadłowe¶
Lambda_fimod = Lambda_fimax = 94.54 [1/s] strojenie niskie
eta_fi = omega_m / Lambda_fimod = 1.10 []
fundament pracuje w strefie rezonanasu
☐ - dodatkwowo uzglednic tłumienie gamma = 0.13 (nie zalecane)
ni = 1 / ((1 - eta_fi^2)^2)^0.5 = 4.88 [] - wzmocnienie
A_do1 = ni * A_o1 = 61.82 [um] - amplituda drgań poziomych
A_do2 = ni * A_o2 = 0.00 [um] - amplituda drgań pionowych
Drgania całkowite¶
A_x = A_do1 = 61.82 [um] - całkowita amplituda drgań poziomych A_xdop = 110.00 [um]
A_z = A_dz + A_do2 = 13.83 [um] - całkowita amplituda drgań pionowych A_zdop = 70.00 [um]
Rezonans przejśćiowy dla Lambda_fimax (drgania wahadłowe)¶
omega_r = 85.94 [1/s]
omega_r / (2*pi) * 60.0 = 820.68 [1/s] x [obr]
Dopuśćzalne amplitudy drgań dla 85.94 [1/s]
☑ (zobacz wykres PN)
Alt text
A_xdop = 140.00 [um] - poziomych
A_zdop = 100.00 [um] - pionowych
P_dred = P_d * (omega_r / omega_m)^2 = 1.08 [kN] -siła dynamiczna dla obrotów 85.94 [1/s]
Drgania pionowe
eta_z = omega_r / (0.75 * Lambda_z) = 0.98 []
ni = 1 / ((1 - eta_z^2)^2 + gamma^2)^0.5 = 7.38 [] - wzmocnienie
A_dz = P_dred / P_d * ni * A_oz = 9.28 [um] - Amplituda drgań pionowych
Drgania wahadłowe
eta_fi = omega_r / (Lambda_fi) = 1.00 []
ni = 1 / ((1 - eta_fi^2)^2 + gamma^2)^0.5 = 7.69 [] - wzmocnienie
A_do1 = P_dred / P_d * ni * A_o1 = 66.89 [um] - amplituda drgań poziomych
A_do2 = P_dred / P_d * ni * A_o2 = 0.00 [um] - amplituda drgań pionowych
Drgania całkowite
A_x = A_do1 = 66.89 [um] - całkowita amplituda drgań poziomych A_xdop = 140.00 [um]
A_z = A_dz + A_do2 = 9.28 [um] - całkowita amplituda drgań pionowych A_zdop = 100.00 [um]
☑ (pomocnicze - zobacz wykres wsp. dynamicznego)
 Alt text
Alt text